- Главная
- Отладочные комплекты HELPER
- Master-модули NIIET
- LDM-HELPER-K1921BK01T-FULL

Артикул: 20113
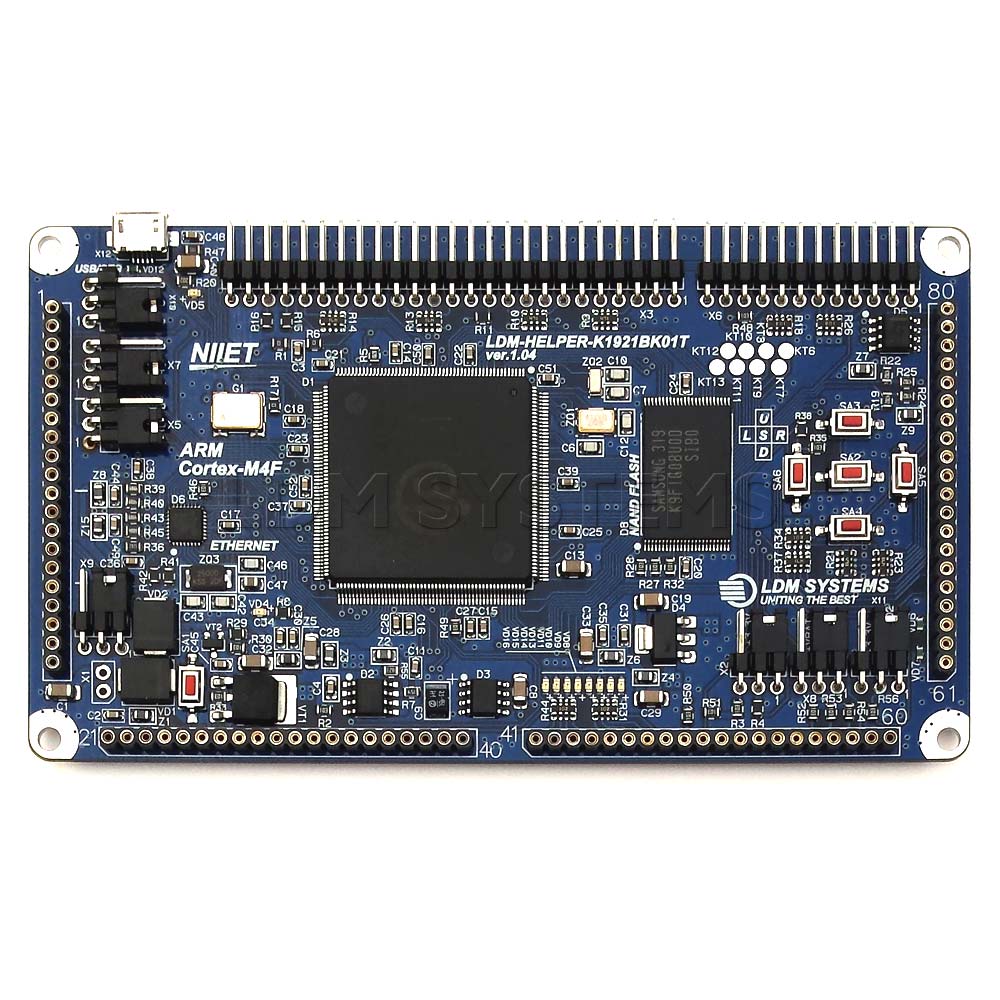
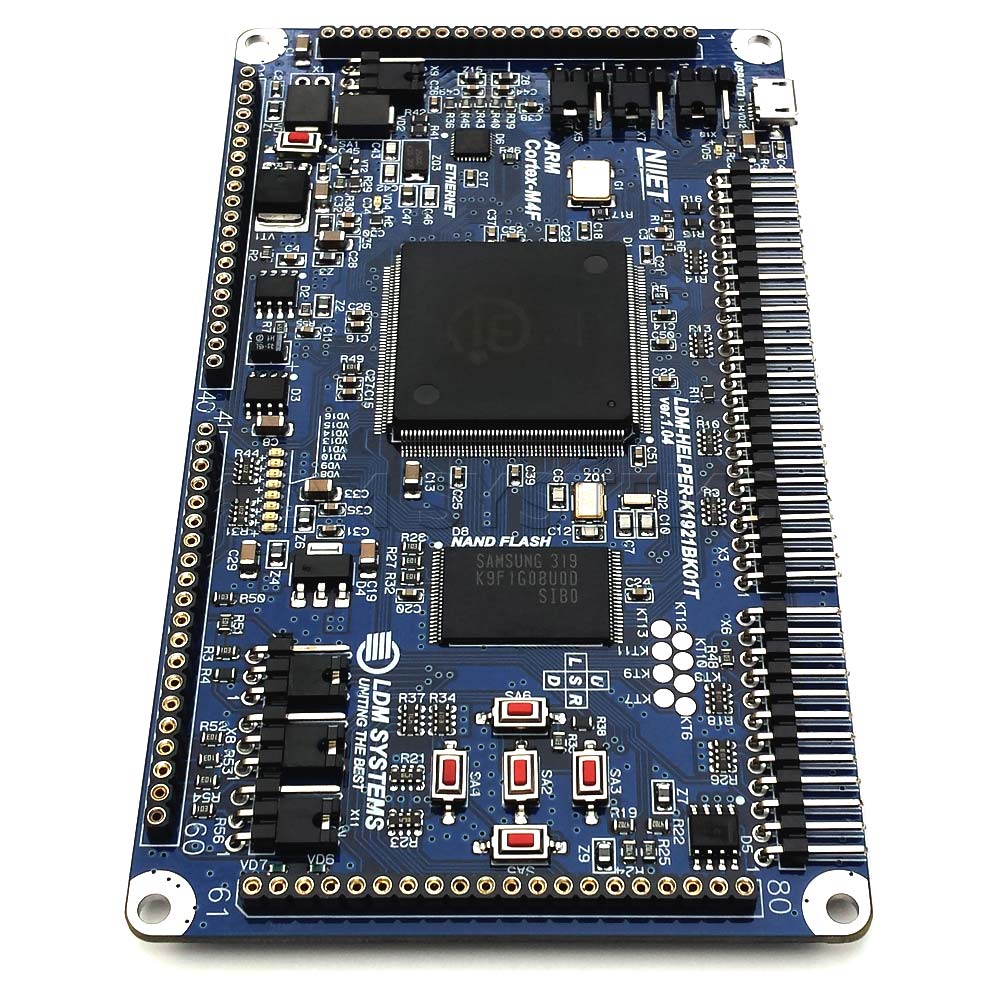
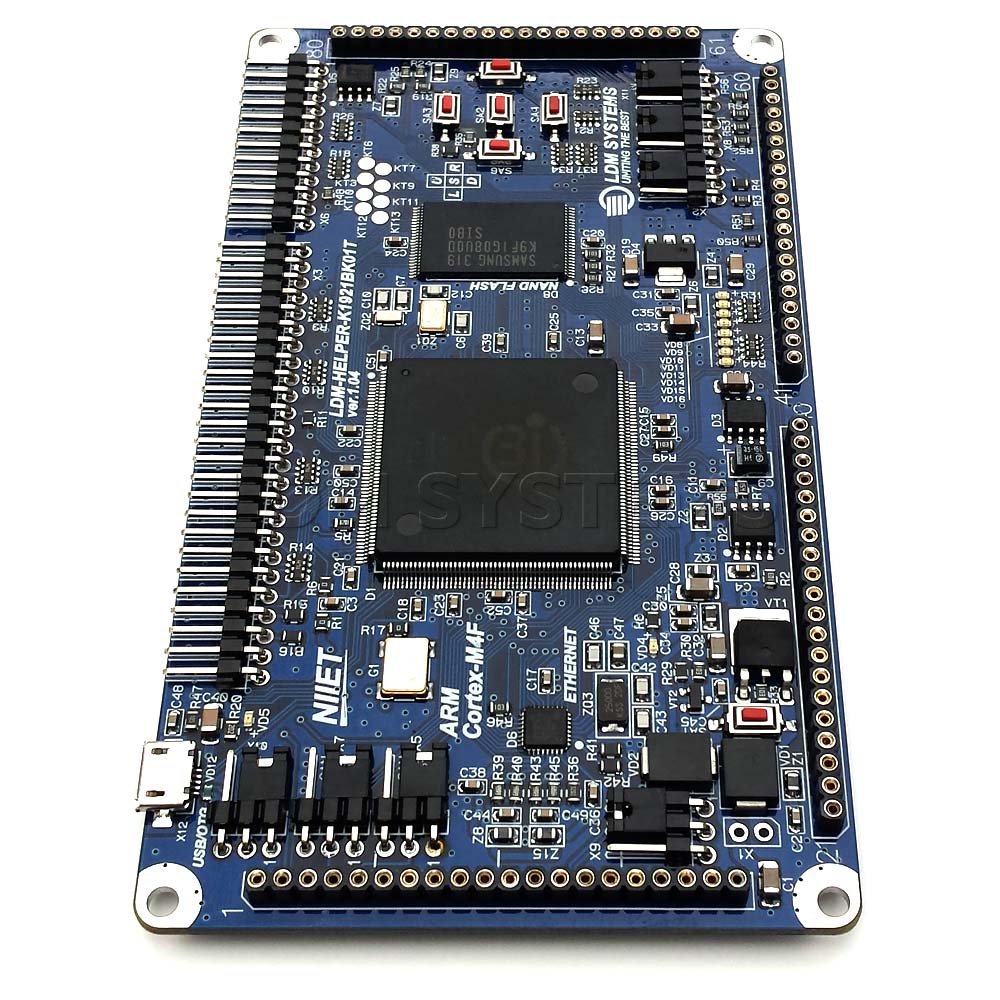
LDM-HELPER-K1921BK01T-FULL
Master-модуль HELPER
ARM Cortex-M4F, 32 бит, K1921BK01T, QFP208L, 127х102х22 мм, 88 линии I/O (Полная комплектация)




- Характеристики
- Документация
- Отзывы (2)
Характеристики LDM-HELPER-K1921BK01T-FULL
| Тип: | Отладочная плата |
| Архитектура контроллера: | ARM Cortex-M4F 32 бит |
| Семейство контроллера: | Cortex-M4F |
| Маркировка контроллера: | К1921ВК01Т |
| Габаритные размеры (ДхШхВ): | 130х74х8 мм |
| Макетное поле (шаг 2.54 мм): | Нет |
| Корпус контроллера: | QFP208L |
| Количество линий I/O: | 88 |
| Кварцевый резонатор: | 16 МГц |
| Напряжение питания платы: | +5 В |
| FLASH программ: | 1 Mб |
| RAM: | 192 Кб |
| FLASH-данных: | 64 Кб |
| Ethernet: | 10/100 Мбит/с с интерфейсом MII |
| USB: | USB 2.0 Device / Host с физическим уровнем (PHY) |
| АЦП: | двенадцать 2-канальных 12-разрядных |
| ЦАП: | 12 бит, 2 канала, 233 ksps |
| ШИМ: | восемнадцать модулей ШИМ (PWM), из них шесть модулей (HRPWM) |
| NAND-FLASH: | 64 МБ |
| Вес: | 70 г |
| Вес с упаковкой: | 277 г |
| ТН ВЭД: | 8471800000 |
| ОКПД2: | 26.20.30.130 |
Документация на LDM-HELPER-K1921BK01T-FULL
Руководство по эксплуатации LDM-HELPER-K1921BK01T(6.02 МБ)
Схема LDM-HELPER-K1921BK01T(247 КБ)
Топология платы по слоям LDM-HELPER-K1921BK01T(833 КБ)
Файлы DXF формата LDM-HELPER-K1921BK01T(5.35 МБ)
Пример проекта LDM-HELPER-K1921BK01T(1.1 МБ)
NIIET.K1921VK01T_DFP.2.0.7.pack(14.11 МБ)
Отзывы покупателей на LDM-HELPER-K1921BK01T-FULL
01.03.2017
User32
Не плохая плата, но со своими недостатками.
Полная комплектация - заманчивый слоган, не раскрывающий тонкостей.
На плате отсутствуют драйверы для подключения CAN, UART, ETHERNET.
Если вы хотите опробовать эти интерфейсы - придется подключать внешние микросхемы-драйверы.Возможно LDM-HELPER MB-501 подойдет, но это из области догадок.
И не забудте прикупить к этой плате переходник JTAG IDC20 PBS12, для экономии места стандартный для ARM JTAG разъем (IDC-20) Не установлен.
Полная комплектация - заманчивый слоган, не раскрывающий тонкостей.
На плате отсутствуют драйверы для подключения CAN, UART, ETHERNET.
Если вы хотите опробовать эти интерфейсы - придется подключать внешние микросхемы-драйверы.Возможно LDM-HELPER MB-501 подойдет, но это из области догадок.
И не забудте прикупить к этой плате переходник JTAG IDC20 PBS12, для экономии места стандартный для ARM JTAG разъем (IDC-20) Не установлен.
13.02.2017
mikhalich
Организация:
ЦИТ ТОБОРОБОТ
Хорошая плата для различных целей. выкладываю пример чтения ADC и вывода в терминал через UART2 с использованием среды VectorIDE от MotorControl.ru
https://bitbucket.org/Mikhalich_master/niietcm4_pd/downloads
https://bitbucket.org/Mikhalich_master/niietcm4_pd/downloads
Аналогичные товары
-
 Master-модульLDM-HELPER-MCP042RQ256-FULL
25 300 руб.
Master-модульLDM-HELPER-MCP042RQ256-FULL
25 300 руб.
-
 Отладочная платаLDM-HELPER-K1986BE1QI-FULL
16 500 руб.
Отладочная платаLDM-HELPER-K1986BE1QI-FULL
16 500 руб.
-
 Отладочная платаLDM-K1986BE92QI-H
9 720 руб.
Отладочная платаLDM-K1986BE92QI-H
9 720 руб.
-
 Отладочная платаLDM-HELPER-EP3C25E144-FULL
46 200 руб.
Отладочная платаLDM-HELPER-EP3C25E144-FULL
46 200 руб.
С этим товаром покупают
-
 ПереходникJTAG IDC20 в PBS12
700 руб.
ПереходникJTAG IDC20 в PBS12
700 руб.
-
 Отладочная платаLDM-HELPER-MB501-FULL
8 000 руб.
Отладочная платаLDM-HELPER-MB501-FULL
8 000 руб.
-
 Slave-модульLDM-HELPER-MCB
1 900 руб.
Slave-модульLDM-HELPER-MCB
1 900 руб.
-
 КабельUSB2.0 USB A-microB
600 руб.
КабельUSB2.0 USB A-microB
600 руб.
-
 Отладочная платаLDM-HELPER-MCP042RQ256-PROF
51 200 руб.
Отладочная платаLDM-HELPER-MCP042RQ256-PROF
51 200 руб.